



商品信息
商品货号:
006920商品品牌:
晒邦商品重量:
3.5克
3D打印机 A4988 步进电机驱动器 Reprap 2盎司 排针已焊 红板
产品介绍:
Ramp1.4的板子简介参考:http://v.youku.com/v_show/id_XNjExNTMwMjA4.html
产品名称:hr4988 步进电机驱动板 Reprap 3D 打印机 StepStick 兼容Arduino
重量:3.7g
特别说明:依据用户的强烈反应,将Rs从0.2欧 更换为 0.1欧,使驱动最大电流可支持2A。
特点优势:
1、品质升级不加价,量大从优,欢迎咨询。
2、最新批号芯片。
3、PCB覆铜工艺升级到2oz(铜皮厚度70um,普通的是35um),含铜量更高,散热性能当然更好。
4、排针已焊,镀金排针,品质优良。
5、不同批次PCB颜色深浅稍有不同,品质同样优异
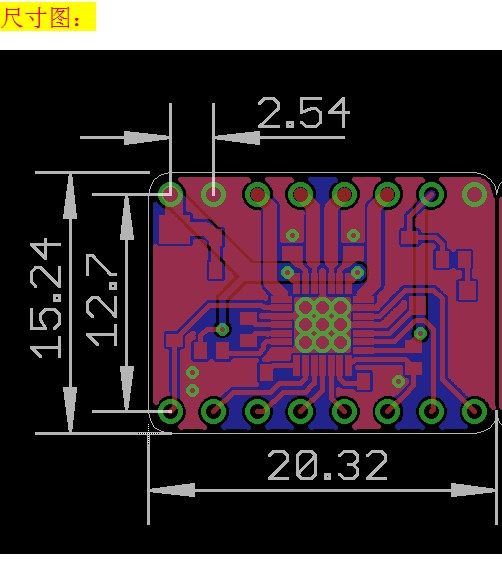
参数:
尺寸:1.5mmX2mm(用于RAMPS,ultimaker或其它兼容板子);
可驱动电流:2A(最好安装散热片)
细分:1,1/2,1/4,1/8,1/16
制造工艺:SMT贴片机制造,非手工焊接,良品率更高,性能更稳定
适合对象:
需要驱动步进电机的场合。
是构建3d打印机,cnc,雕刻机等必备模块。
支持的3d打印机有Prusa Mendel,ultimaker,printbot,makerbot等。
可以参考后面的 Arduino代码,直接驱动电机
发货清单:
1、A4988模块(带排针)
技术支持及保证:
和官方Wiki产品,100%一致!PCB源文件链接:http://reprap.org/wiki/Stepstick。
发货前会做通电测试,保证可以正式使用才发货。
注意事项参考:http://flyway97.blog.163.com/blog/static/2220320412013111910433463/
欢迎各位朋友加入讨论群:156492164。
欢迎光临我的博客交流:http://flyway97.blog.163.com
核心芯片A4988介绍:
A4988是一款带转换器和过流保护的 DMOS 微步驱动器,该产品可在全、半、1/4、1/8 及 1/16 步进模式时操作双极步进电动机,输出驱动性能可达 35 V 及 ±2 ,A4988 包括一个固定关断时间电流稳压器,该稳压器可在慢或混合衰减模式下工作。转换器是 A4988 易于实施的关键。只要在“步进”输入中输入一个脉冲,即可驱动电动机产生微步。无须进行相位顺序表、高频率控制行或复杂的界面编程。A4988 界面非常适合复杂的微处理器不可用或过载的应用。
A4988特色有以下几点:
1、适合驱动8V~35V 2A以下的步进电机;
2、只有简单的步进和方向控制接口;
3、五个不同的步进模式:全、半、1/4、1/8和1/16;
4、可调电位器可以调节最大电流输出,从而获得更高的步进率;
5、自动电流衰减模式检测/选择;
6、过热关闭电路、欠压锁定、交叉电流保护;
7、接地短路保护和加载短路保护
用作3D打印机,需要配套的电路模块:
Arduino 2560 CPU核心板
Ramps1.4主控板
A4988驱动板 步进电机驱动模块(单头4片,双头5片)
LCD液晶控制器 可LCD液晶控制、SD卡脱机打印(选配)
使用Arduino直接控制电机用法:
连接如下,UNO控制STEP和DIR就可以制动A4988。
1A,1B接一组,2A,2B接另一组,一般 1a 2a都是连接正极,1b 2b都是连接负极,因为电机各个不太一样,最好接好后试走一下看走向是否对,如果不对的话,就正负换一下。
测试代码:
int dirPin = 8;
int stepperPin = 7;
void setup()
{
pinMode(dirPin, OUTPUT);
pinMode(stepperPin, OUTPUT);
}
void step(boolean dir,int steps)
{
digitalWrite(dirPin,dir);
delay(50);
for(int i=0;i
digitalWrite(stepperPin, HIGH);
delayMicroseconds(800);
digitalWrite(stepperPin, LOW);
delayMicroseconds(800); }
}
void loop()
{
step(true,1600);
delay(500);
step(false,1600*5);
delay(500);
}
实物拍摄:



